Gyda thwf cyflym y galw am drafnidiaeth ffyrdd, mae cerbydau gorlwythog yn peri risgiau sylweddol i ffyrdd, pontydd, twneli, a diogelwch traffig cyffredinol. Mae dulliau rheoli gorlwytho traddodiadol, oherwydd gwybodaeth dameidiog, effeithlonrwydd isel, ac ymateb araf, yn gynyddol analluog i fodloni gofynion rheoleiddio modern. Mewn ymateb, mae ein cwmni wedi datblygu'rSystem Gwybodaeth Rheoli Gorlwytho Clyfar, gan ddefnyddio technoleg gwybodaeth, rhwydweithio, a thechnolegau deallus i gyflawni casglu data canolog, rheolaeth ddeinamig, cymharu amser real, dadansoddi deallus, a phrosesu awtomataidd. Mae'r system hon yn darparu offer effeithlon a chywir i awdurdodau rheoli traffig ar gyfer rheoli gorlwytho, gan sicrhau diogelwch ffyrdd a gwydnwch seilwaith.
Mae ein system wedi'i chynllunio ar fframwaith lefel genedlaethol, gan adeiladu strwythur rheoli a goruchwylio gorlwytho cynhwysfawr, llawn amser, cadwyn lawn, a rhanbarth llawn. Mae'n galluogi rhyng-gysylltu a rhannu data rhwng gorsafoedd ffynhonnell, ffyrdd sefydlog, gorfodi ffyrdd symudol, a'r ganolfan reoli ganolog genedlaethol, gan ffurfio model rheoleiddio proses lawn o lwytho ffynhonnell i weithredu a gorfodi ffyrdd. Trwy fonitro technolegol, cydweithio data, a gorfodi dolen gaeedig, mae'r system yn rheoli gorlwytho yn effeithiol wrth y ffynhonnell, yn sicrhau bod ffyrdd yn aros o fewn oes gwasanaeth, yn hyrwyddo gweithrediadau cerbydau rheoleiddiedig a thollau teg, ac yn diogelu seilwaith trafnidiaeth a buddiannau cenedlaethol.
Mae'r system gyffredinol yn cynnwys pedwar modiwl swyddogaethol mawr: y System Rheoli Gorlwytho Gorsaf Ffynhonnell, y System Rheoli Gorlwytho Ffyrdd Sefydlog (priffyrdd + ffyrdd cenedlaethol, taleithiol, bwrdeistrefol a sirol), y System Rheoli Gorlwytho Ffyrdd Symudol, a'r System Rheoli Tollau. Mae'r modiwlau hyn yn gweithio ar y cyd i greu system oruchwylio gynhwysfawr sy'n cwmpasu'r rhwydwaith ffyrdd cyfan a phob senario.
Rhan Un: System Rheoli Gorlwytho Gorsaf Ffynhonnell
Prif nod System Rheoli Gorlwytho Gorsafoedd Ffynhonnell yw lleihau neu ddileu cerbydau gorlwythog sy'n gadael gorsafoedd tarddiad. Mae targedau allweddol yn cynnwys cerbydau o fwyngloddiau, porthladdoedd, meysydd awyr, parciau logisteg, ffatrïoedd a chwmnïau trafnidiaeth. Mae monitro parhaus, 24/7 yn sicrhau bod cerbydau'n cydymffurfio â rheoliadau llwytho wrth y ffynhonnell.
1. System Pwyso Cerbydau Dynamig Wyth-Platfform
Wrth allanfeydd safleoedd sy'n cael eu monitro, defnyddir y System Pwyso Cerbydau Dynamig Wyth-Platfform i ganfod gorlwythi cerbydau yn llym cyn iddynt fynd ar ffyrdd cyhoeddus. Mae'r system hon yn cynnwys:
Graddfa Cerbydau Electronig Wyth-Platfform– Yn defnyddio celloedd llwyth manwl gywir, cyfrif echelau a chydnabyddiaeth pellter, mesur dimensiwn cerbydau, a gwahanu raster optegol i ganfod pwysau a maint cerbydau yn ddeinamig.
System Rheoli Pwyso Di-griw– Yn cynnwys cyfrifiaduron personol diwydiannol, meddalwedd rheoli pwyso, camerâu gwyliadwriaeth, sgriniau arddangos LED, awgrymiadau llais, cypyrddau rheoli deallus, a systemau rhwydweithio i adnabod cerbydau'n awtomatig, casglu data, pennu statws gorlwytho, a rheoli rhyddhau.
Llif Gwaith Gweithredol: Mae cerbydau'n mynd i mewn i'r ardal bwyso ar ôl llwytho. Mae'r system yn mesur pwysau a dimensiynau'n awtomatig ac yn eu cymharu â therfynau llwyth cymeradwy. Caiff cerbydau cydymffurfiol eu rhyddhau'n awtomatig, tra bod gofyn i gerbydau gorlwythedig ddadlwytho nes eu bod yn bodloni safonau. Mae'r system yn integreiddio â llwyfannau llywodraeth ranbarthol i alluogi rhannu data a goruchwylio o bell, gan sicrhau gwelededd amser real o reolaeth gorlwytho ffynhonnell.
2. System Pwyso ar y Cerbyd
Er mwyn cyflawni goruchwyliaeth ddeinamig ymhellach, mae cerbydau wedi'u cyfarparu â'r System Pwyso Cerbydau Ar y Bwrdd, sy'n gallu monitro llwythi cerbydau statig a deinamig mewn amser real. Mae'r system yn cynnwys meddalwedd pwyso ar y bwrdd, arddangosfeydd offerynnau clyfar, ac unedau pwyso (math pellter laser neu fesurydd straen), gan ganiatáu i yrwyr weld y llwyth cyfredol a derbyn rhybuddion wrth lwytho. Anogir cerbydau gorlwythog i ddadlwytho, gyda data'n cael ei uwchlwytho ar yr un pryd i lwyfannau rheoli fflyd a systemau'r llywodraeth, ac, os oes angen, yn cynhyrchu hysbysiadau gorlwytho neu ddirwyon yn awtomatig.
Mae'r system yn defnyddio celloedd llwyth ataliad i fonitro anffurfiad sbringiau dail, echelau, neu ataliadau aer ac yn defnyddio methodoleg "synhwyro-calibradu-cyfrifo-cymhwyso" dolen gaeedig i adeiladu modelau llwyth. Mae algorithmau meddalwedd yn gwneud iawn am ffactorau amgylcheddol, gan sicrhau cywirdeb mesur. Mae cywirdeb pwyso statig yn cyrraedd ±0.1%~±0.5%, tra bod cywirdeb pwyso anuniongyrchol yn cyflawni ±3%~±5% o dan amodau delfrydol, sy'n addas ar gyfer rheolaeth weithredol a rhybuddion risg.
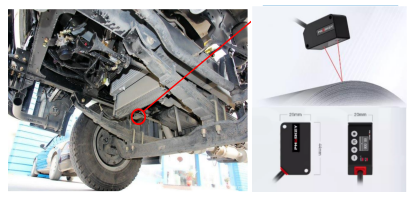
System Mesur Pellter Laser Anffurfiad Ffrâm wedi'i Gosod ar Ataliad

Anffurfiad Ffrâm wedi'i Gosod ar AtaliadCell Llwyth
Drwy gyfuno'r System Pwyso Cerbydau Dynamig Wyth-Platfform â'r System Pwyso Cerbydau Ar y Bwrdd, gall cerbydau hunanwirio, gall fflydoedd hunanarolygu, a gall awdurdodau oruchwylio'r broses gyfan, gan greu model rheoli gorlwytho ffynhonnell cwbl integredig, amser real sy'n sicrhau diogelwch traffig a sefydlogrwydd seilwaith hirdymor.
Amser postio: Rhag-09-2025